아두이노의 작품을 만들고 싶다면? 아이디어를 구현하고 싶다면? 각종 아두이노 부속 및 모듈 맞춤제작 및 아두이노 키트 시리즈.. 주영소프트 https://smartstore.naver.com/jy-soft 아두이노의 작품을 만들고 싶다면? 아이디어를 구현하고 싶다면? 각종 아두이노 부속 및 모듈 맞춤제작 및 아두이노 키트 시리즈.. 주영 소프트 https://smartstore.naver.com/jy-soft
주영소프트 : 네이버쇼핑 스마트스토어 아두이노 부속 판매및 주문제작 smartstore.naver.com 주영소프트 : 네이버쇼핑 스마트스토어 아두이노 부속 판매및주문제작 smartstore.naver.com

————————————————————————————— 졸업작품이나 캡스톤디자인 아두이노 코딩에 자문 및 가이드가 필요하신 분은 아래 연락처로 연락주시면 저렴한 비용으로 지도(가이드)하겠습니다. 아두이노 관련 질문 답변 오픈채팅방 : https://open.kakao.com/o/gJ9qPMef 래문의 : https://blog.naver.com/mapes_khkim/221917922453 아두이노관련 유튜브 채널 : https://www.youtube.com/kProjectArduino 아두이노관련 네이버 카페 : https://cafe.naver.com/arduinodiy 작품블로그 : https://blog.naver.com/mapes_khkim————————————————————————————— #아두이노 #강좌 #아두이노강좌 #캡스톤디자인 #졸업#의뢰#자문#ESP32 #키트 #주문제작 #앱인벤터 #자율주행#자동차#스텝모터#졸업작품 https://youtu.be/Dzjy0gK9JRs ————————————————————————————— 졸업작품이나 캡스톤디자인 아두이노 코딩에 자문 및 가이드가 필요하신 분은 아래 연락처로 연락주시면 저렴한 비용으로 지도(가이드)하겠습니다. 아두이노 관련 질문 답변 오픈채팅방 : https://open.kakao.com/o/gJ9qPMef 래문의 : https://blog.naver.com/mapes_khkim/221917922453 아두이노관련 유튜브 채널 : https://www.youtube.com/kProjectArduino 아두이노관련 네이버 카페 : https://cafe.naver.com/arduinodiy 작품블로그 : https://blog.naver.com/mapes_khkim————————————————————————————— #아두이노 #강좌 #아두이노강좌 #캡스톤디자인 #졸업#의뢰#자문#ESP32 #키트 #주문제작 #앱인벤터 #자율주행#자동차#스텝모터#졸업작품 https://youtu.be/Dzjy0gK9JRs
인기글

![[상품평] 강아지 간식 쇼핑몰 복실마켓 - 반려동물간식 오리가슴살](https://image.babosarang.co.kr/product/detail/FT6/2208181660803188/_600.jpg "[상품평] 강아지 간식 쇼핑몰 복실마켓 - 반려동물간식 오리가슴살")


관련제품https://smartstore.naver.com/jy-soft/products/8115470421 관련제품https://smartstore.naver.com/jy-soft/products/8115470421
Juyeon software STEP MOTOR AUTOMOBILE Kit: Juyeon software [Juyeon software] Aduino included sales and custom-made smartstore.naver.com Juyeon software STEP MOTOR AUTOMOBILE Kit: Juyeon software [Juyeon software] Aduino Included Sales and Custom Made smartstore.naver.com

No language detected.
Please check the input language, no language detected.
Please check the input language.

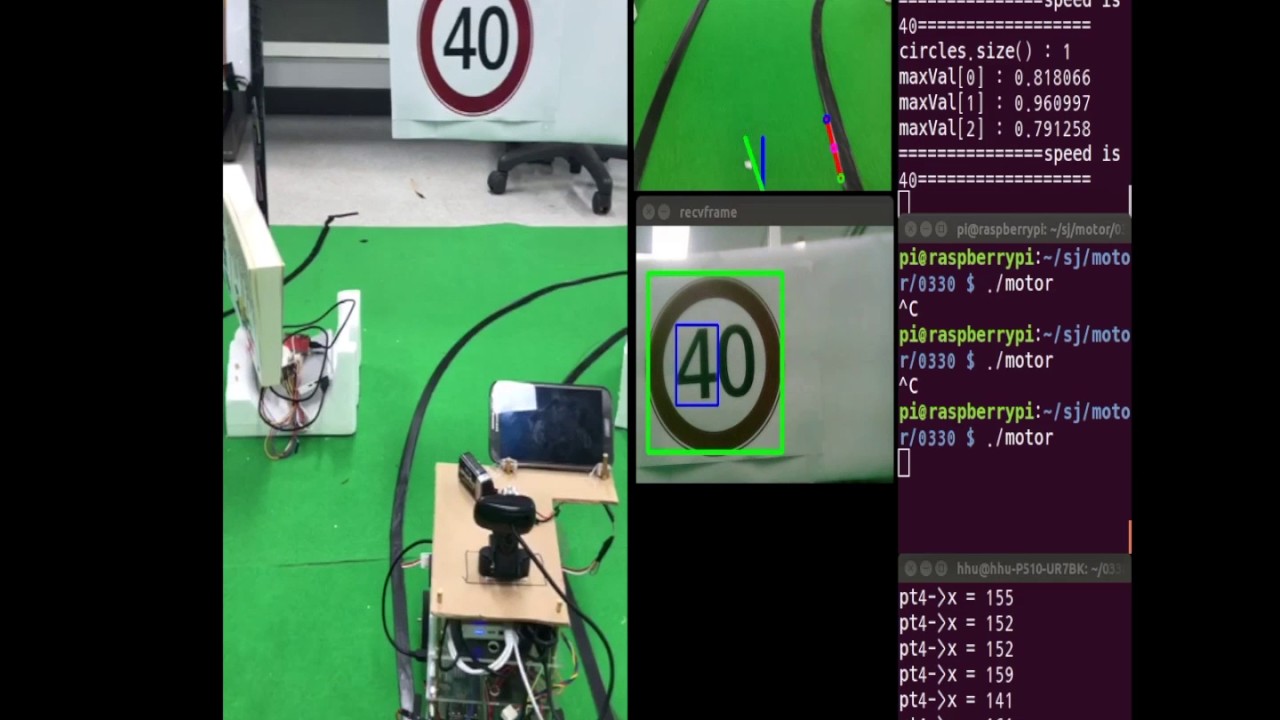
Hello, this is Project K. This video shows a lane-recognition self-driving car using Arduino. https://youtu.be/Dzjy0gK9JRs?t=7s Hello, this is Project K. This video shows a lane-recognition self-driving car using Arduino. https://youtu.be/Dzjy0gK9JRs?t=7s

A camera is installed in the Aduino car to recognize the lane and drive along the lane. A camera is installed in the Aduino car to recognize the lane and drive along the lane.
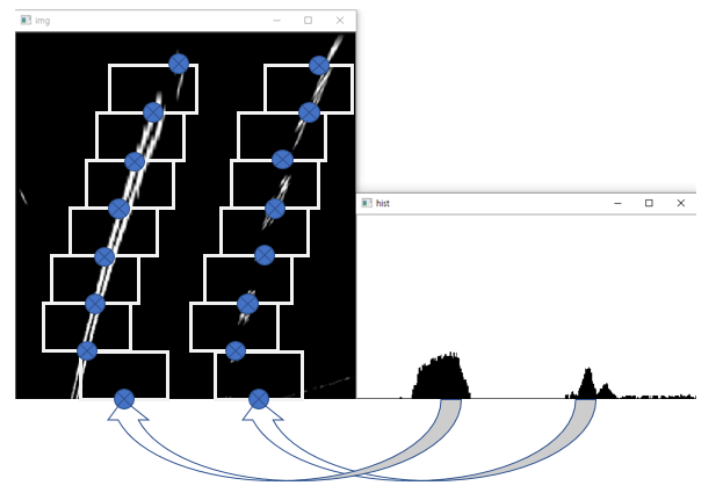
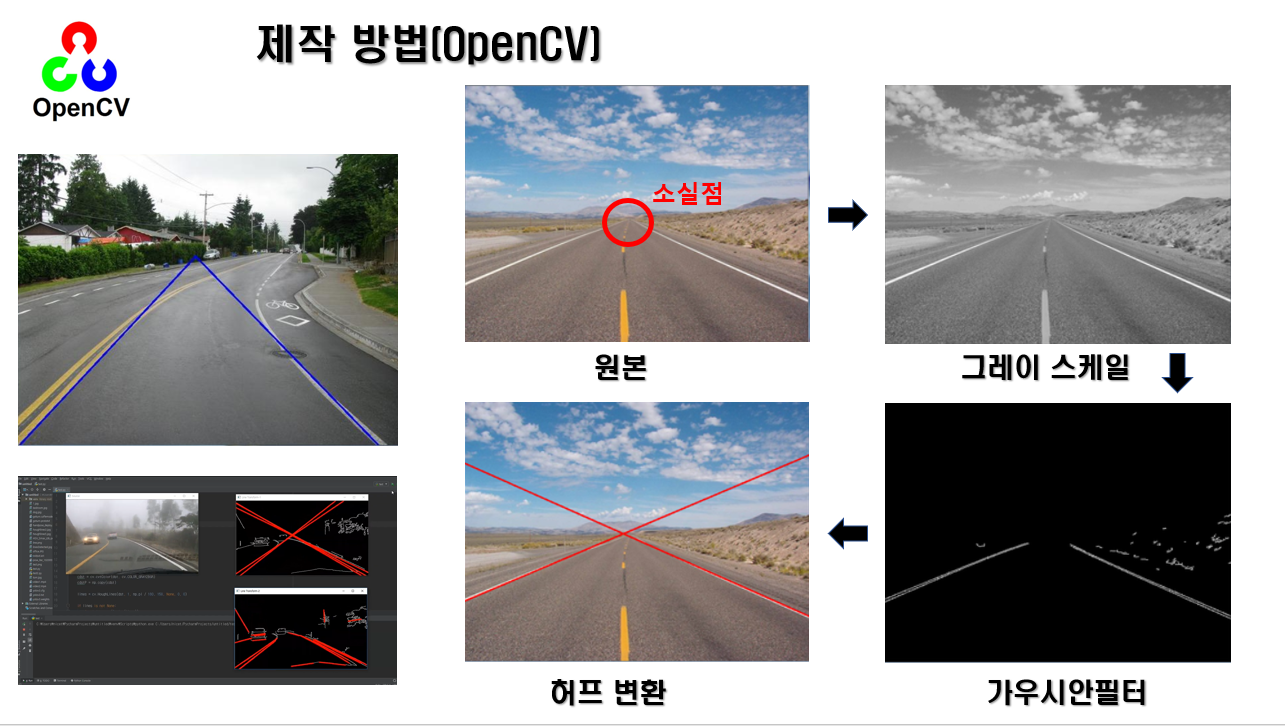
The vehicle uses an ESP32 CAM and an ESP32 CAM for camera shooting, and the PC uses Wi-Fi to transmit the captured video to the PC, and the PC uses OPENCV to detect the lane of the received video and send a moving order to the vehicle. The vehicle uses an ESP32 CAM and an ESP32 CAM for camera shooting, and the PC uses Wi-Fi to transmit the captured video to the PC, and the PC uses OPENCV to detect the lane of the received video and send a moving order to the vehicle.

At first, I installed a camera on the front of the car. I used ESP32 CAM to shoot images, and I used a 160-degree wide-angle camera. https://youtu.be/Dzjy0gK9JRs?t=89s At first, I installed a camera on the front of the car. I used ESP32 CAM to shoot images, and I used a 160-degree wide-angle camera. https://youtu.be/Dzjy0gK9JRs?t=89s
When installing a camera on the front, it is difficult to recognize both lanes at once due to the close proximity of the video lane and narrow vision, which often caused the vehicle to move zigzag as only one lane was detected. When installing a camera on the front, it is difficult to recognize both lanes at once due to the close proximity of the video lane and narrow vision, which often caused the vehicle to move zigzag as only one lane was detected.
The camera position was moved to the top of the vehicle to resolve the narrow view of the front camera. The camera position was moved to the top of the vehicle to resolve the narrow view of the front camera.
The distance between the lane and the camera has become longer, and the view of lane recognition has become wider, enabling smoother driving. The distance between the https://youtu.be/Dzjy0gK9JRs?t=151s lane and the camera has increased, and the view of lane recognition has increased, allowing for smoother driving. https://youtu.be/Dzjy0gK9JRs?t=151s